The interaction between humans and products is an important part of how products are used and, as a result, being designed. Appropriated from a long tradition of cognitive psychology, designers are known to use mental representations in their interaction designs (van Dijk & van der Lugt & Hummels, 2014). However, there is upcoming more interest to not look at the purely cognitive aspects of interaction, but
In this case, the practice of social dance is chosen for two reasons: (1) the author has a passion and expertise in social dancing, (2) an interesting parallel can be found between social dancing and human-product interaction: both are based on two entities interacting by using non-verbal communication. This is also what makes the use of social dance different than previous literature which considered dancing as having expert knowledge of movement and not knowledge of interaction. Social dances have been formulating and studying the ways in which people can move and communicate together naturally through movement for years. In addition, the redesign of the vacuum cleaner is chosen as an example to focus and apply the exploration of social dance in design on to be able to have a tangible example which is both in favor of the exploration itself and the readability of the paper. The used method is, therefore, following a research-through-design approach (Findeli, 2010; Frayling, 1993) in which the vacuum cleaning redesign process is the method of researching the broader question of the use of social dance in design.
Methodology
In the first part of the paper, the background on embodied design, and as an extension,
PART I | BACKGROUND OF DANCE IN DESIGN
Cognition, bodies
In recent years, a new way to think about minds, bodies
More specifically, a growing field of expertise within embodied interaction design is movement-based-design. It entails a variety of different approaches to design for and from the moving body. There are cases, for example, where designers are making use of dancers or choreography in the design process to design better interactions and movements (Loke & Robertson, 2008). All approaches have a shared commitment to using their personal experiences as sensing, feeling and moving bodies in their designs. And so, interaction is designed from movement, instead of taking technology as a starting point (Loke & Robertson, 2008). This focus on the movement abilities of users in interaction with technology allows an interaction that fits more naturally with the way people are accustomed to move their bodies in the physical world (Larssen et al, 2004).
First-person-methodologies
In this paper, a new way of designing for a smooth human-technology interaction from an embodied perspective will be explored using a first-person-methodology. In these types of methodologies, the body-in-motion and its felt-experience are the source for exploration of concepts in design for successful engaging interactions between human and technology (Loke & Robertson, 2008; Schiphorst, 2007). To design a better interaction between human and technology, one needs to understand how a smooth interaction feels. The author has the ability to use first-person-experience from three different angles in the redesign of the vacuum cleaner interaction: she is (1) a dancer, (2) a vacuum cleaner user, and (3) a designer. As a user, the (unpleasant) experience of vacuum cleaning can be explored. As a dancer new input from knowledge of the pleasant experience of a dance interaction can be described, which can be implemented in the design as a designer. As this account of social dance in design uses the personal experience of the author, she will use the pronoun ‘I’ from here on when describing the subjective practicing of social dancing or vacuum cleaning. These experiences can then form the basis on which a redesign for the vacuum cleaner interaction, in this case, will be made.
The author has been dancing and teaching blues and swing dances for over five years and has met and learned from many body (movement) geeks. For purposes of this paper, the social dance concepts of the author’s main dance form, bluesdancing, will be used. The bluesdancing tradition stems from a group of people who were actually unable to communicate verbally with each other and is more focused on improvisation and conversation than swing dances. Therefore, blues fits the purposes of designing for non-verbal human-technology interaction better. However, there are more social dances, such as latin-based dances, that are often using similar concepts that can probably be used just as well.
PART II | SOCIAL DANCE EXPERIENCES & THE VACUUM CLEANER
First, a bit of background about bluesdancing is in its place to be able to understand the experience of dancing blues and, with that, how the experience can be applied in design. What we nowadays call bluesdancing, is a set of idiom dances that emerged in the 1800s in the South of the United States by the Afro-American workers on the plantations. These dances were danced in small spaces, the dancers came from different parts of Africa and were not always able to communicate verbally with each other, the music was fairly simple, since there was no money for a lot of instruments and life on the plantation was both mentally and physically hard. The dance died out for a while and so there is not much knowledge of how the dance was danced exactly at that time. However, since its revival in the 1990’s, there is increasingly more consensus on what ‘bluesdancing’ is: what is inherent to bluesdancing in practically all opinions is that it is a dance that is meant to be social, improvisational and expressive.
It means that, nowadays, when you follow a bluesdance workshop, the focus is on learning how to connect with your partner and the music and how to communicate with each other using movement. So the gross of classes is not about learning specific steps, but about learning technical concepts of posture, movement, tension, different rhythms and ways of being creative and expressive in your dance. As a bluesdancing teacher, it is, as a result, a common exercise to find words and metaphors to describe the feeling of bluesdancing.
In this paper, I would like to explore a few of these concepts as my experiences of a pleasant social dance in light of the interaction between vacuum cleaner and user with the goal to improve this interaction. I will start with describing how a bluesdance flows in its movement, after which I’ll explain how the flow is the basis of the dance being improvisational and how this, finally, ensures an interaction between two autonomous agents that are leading and following each other. Through these concepts I will come to a definition of what I would call a ‘dancing interaction’ between human and product.
Flow of movement
I’m usually not really looking forward to using the vacuum cleaner, because it is a hassle to get it out of the storage closet, plug-in and move the thing with me as I am vacuuming the room. There are a few places in my room where the vacuum cleaner usually gets stuck: behind the legs of my bed and on the doorstep into my hallway, for example. Unfortunately, my vacuum cleaner is not of high quality, which means that when this happens, I often accidentally jack the tube out of the machine. Eventually, I started to put the vacuum cleaner in the middle of my room by hand and was then vacuuming around it, moving the vacuum cleaner as little as possible. However, this new strategy brought its own problems with it: I was getting horribly stuck in the cables and tube that turned around me, the vacuum cleaner and each other.
In conclusion, vacuum cleaning your room is not only an unpleasant activity because it is a mundane household task, but also because the interaction feels unnatural, jerky and annoying. In other words, it is not smooth. This is in stark contrast to my experience as a social dancer. Even in interaction with a dance partner, my movement keeps on flowing smoothly throughout the dance both as a leader and a follower: there are no breaks or sharp corners in the movement. When looking at my center of mass from above, my movement would draw the type of patterns as shown on the left side of figure 2 in contrast to the right side, where the movement is not flowing, but jerky. When the dancers find this flow in their partnership, the dancing feels right: as if it matches the other person and enables the dancers to become one with each other and the music.
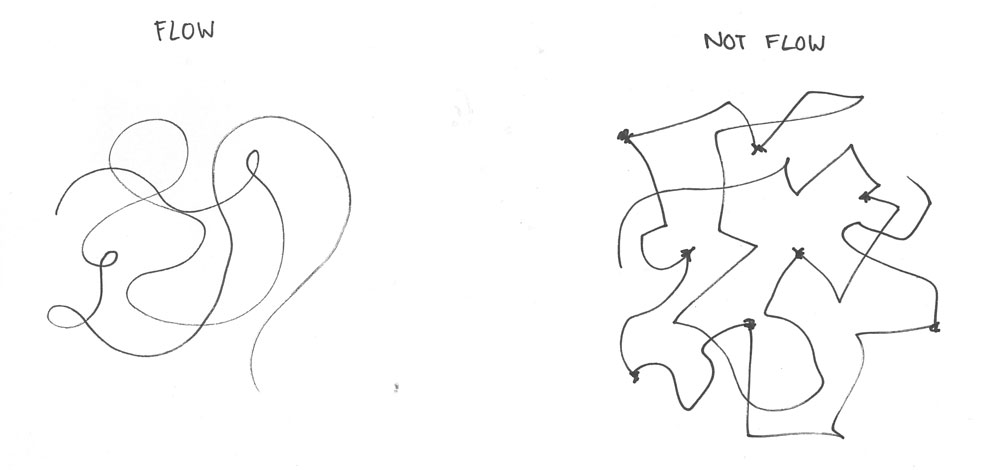
Figure 2: birds-eye view of the movement of a flowing and a non-flowing center of mass
This concept of ‘flow’ is extremely important in social dancing because understanding and having the flow improves leading, following, and improvisation. All three are an extension of the flow of movement in the body. What I often see beginner leaders do is sending their followers away and then catching them, breaking all their movement before sending them out again. At the same time, beginner followers often think from
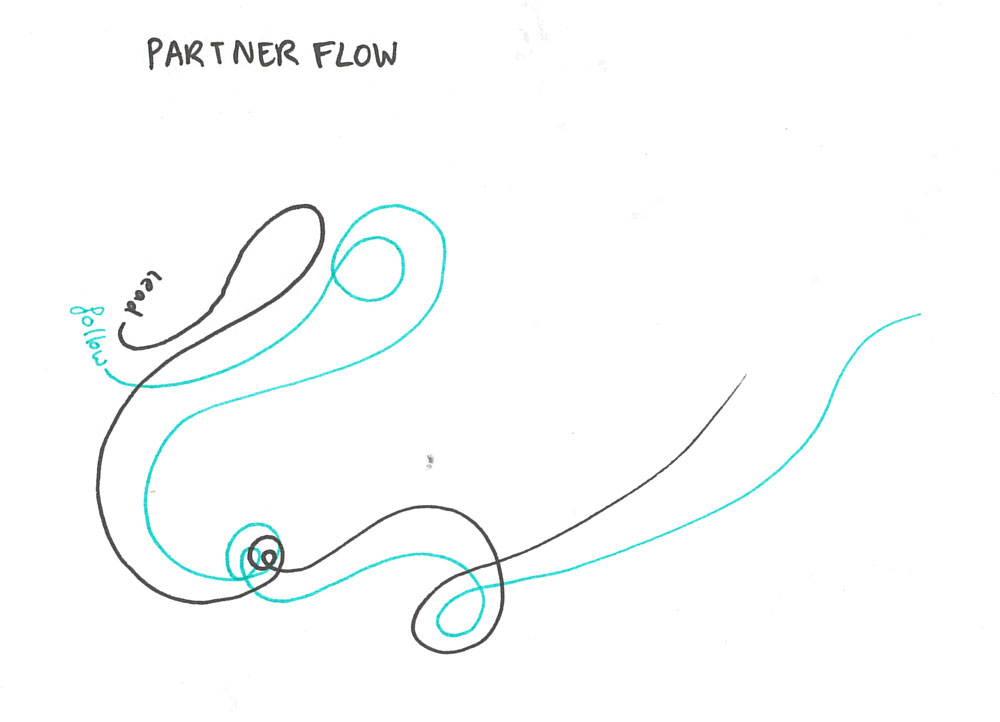
Figure 3: birds-eye view of a partnerflow
To take a side-step back to embodied design research, the idea of ‘flow’ has been examined before in different practices and with different terminology. Jensen, Buur
Improvisation
Blues, like many other social dances, is an improvisational dance. It means that you can dance with anyone to any music at any moment and create a stylistic and expressive dance together. There are no fixed steps or patterns that you need to learn to be able to dance. It is, in my experience, therefore really dancing, instead of moving to music. It is completely different than other dances in which first a choreography is created and then it is executed on music. Blues is a reaction, an expression or translation, to the music and situation the dancer is in, done in a split second. To be able to do it well, you need to have this sense of becoming one with the music and the other, tapping into your immediate reactions and stop thinking about
In embodied cognition literature, this notion of acting as reaction in specific situations is called ‘situatedness’ or ‘situated actions’ (Suchman, 1987, Van Dijk & Van der Lugt & Hummels, 2014). Suchman (1987) takes the position that all actions, even planned actions, are situated. Simply because the circumstances of our actions are never fully anticipated beforehand (Suchman, 1987). People move through life improvising from moment to moment. However, the amount of situatedness depends on the nature of the activity and the degree of expertise. In social dancing, I teach beginners first a few moves, common patterns, that they can execute according a fixed plan. Then during the course I teach them at what moments they could start the common patterns and finally I teach them to come up with their own patterns inspired by the specific situation they are in. I encourage them to become authentic in their expression of the movement, to transcend rules and patterns and start tapping into who they are as existing beings.
When using the vacuum cleaner, the same notion can be found. I am not, before getting the vacuum cleaner out of the closet, deciding what corner of the room I will start in. Perhaps the first time in a specific room I think about some difficult spots that I should not forget. Usually, I simply grab the
Leading & following
Then what exactly can the use of social dancing in design offer to create a new kind of interaction? It is the concept of leading and following, which combines both ‘flow of movement’ and ‘improvisation’ (together with other concepts beyond the scope of this paper) into a situated and expressive dialogue between dance partners and music, which I label as conversational dancing. This non-verbal conversation is what makes social dancing into an actual interaction, that will form the basis of a ‘dancing interaction’.
To ensure a smooth situated interaction and flow in the dance, social dancers use a couple of concepts to clearly, but gently, lead and follow. First of all, it is important to note that both
A social dance is, in that sense, an example of
In case of the vacuum cleaner, it is not following actively. It is, in fact, passively being dragged around by the force of the user, creating the jerky interaction. The vacuum cleaner is not an autonomous interactor in the interaction. As a vacuum cleaner user, I also don’t expect it to, because I have grown accustomed to this kind of interaction. It is, however, not pleasant, because it is a dragging around instead of an interaction. On the other side of the spectrum, there is the robot vacuum cleaner, such as the Roomba. These vacuum cleaners operate completely autonomous: at certain times of the week or day, it leaves its charging station and finds its way through the living room, vacuuming it completely. As a user, I don’t even have to be present. However, if I would be present, it would react to me. It would see me as another object to be circumvented. Hence, even though the robot vacuum cleaner is autonomous in how it reacts to me, again: there is no interaction. It is a solo dance.
A ‘dancing interaction’
An ideal ‘dancing interaction’ with a vacuum cleaner would, therefore, be like a conversational dance, as an interactive dialogue between two parties: both contributing to the overarching situated process in a flowing movement. It should feel as if both parties are active in the main task of vacuum cleaning. In a quite literal sense, it could be a compromise between the robot vacuum cleaner and the “normal” one. It is autonomously following and flowing in the interaction. However, even a non-intelligent vacuum cleaner could be more autonomous in the interaction as a pole or stick in
Hence, in a redesign of a normal vacuum cleaner that has more of a ‘dancing interaction’ with its user, it is extremely important to make sure the vacuum cleaner has a stable and smooth flow in its movement. A flowing movement of a vacuum cleaner is, in my opinion, how a non-intelligent object that is moving around can become autonomous in an interaction, because flow, together with rhythm, is what people use to predict and understand movement. What makes this objective difficult for designers is, however, that at the same time, the activity of vacuum cleaning is a situated action: it is improvised. And so, the task at hand is to create a predictable, flowing moving vacuum cleaner in a non-defined order and unknown situation. To be able to design for such a contradiction, social dance can offer a way for designers to understand these concepts and movements in their own bodies by actually dancing themselves.
Results: redesign the vacuum cleaner
In the process of redesigning the vacuum cleaner, I tried to come up with ideas to improve the vacuum cleaning activity by applying what I had learned in the embodied design research and my experience of social dance. During the ideation
In the redesign of this vacuum cleaner, the functionality should stay the same, but the way of interacting and, as a result, the visual design could change. I came up with different design ideas ranging from slight to radical changes in interaction (see figure 4). A simple solution would be to get rid of all kinds of tubes and cables and make the cleaner move around easily using a
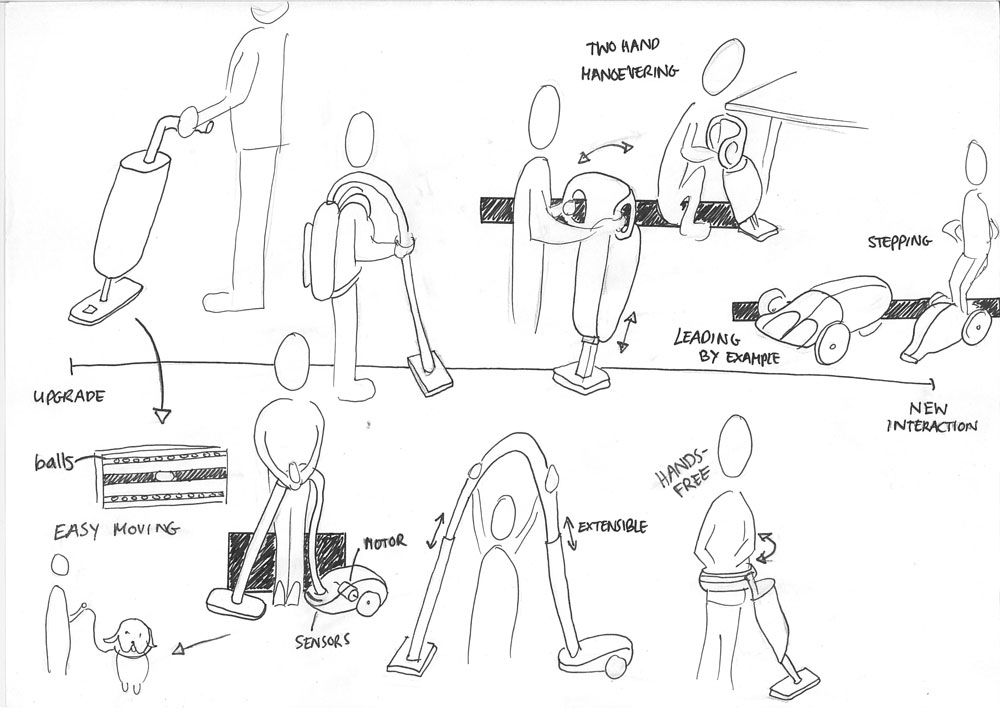
Figure 4: Design sketches for a new vacuum cleaning interaction
The two-hand-maneuvering idea has been chosen to be elaborated
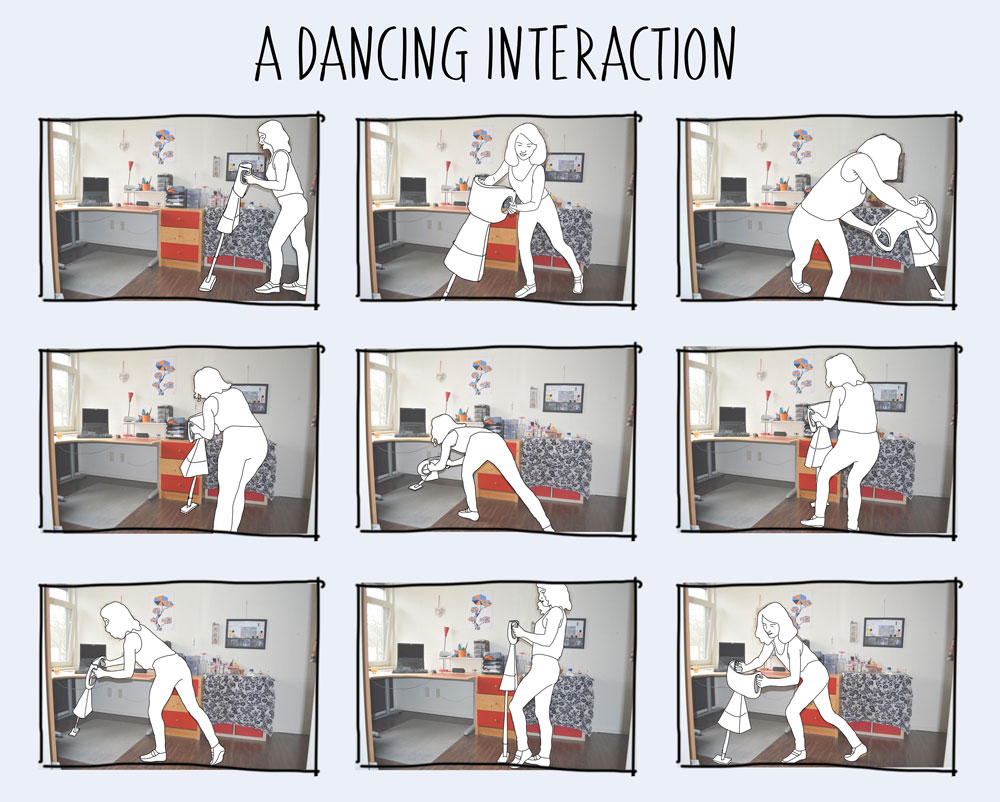
Figure 5: Storyboard of a dancing interaction with the vacuum cleaner
PART III | EXTRAPOLATION
Discussion
The case study of the vacuum cleaner showed how the described experience of social dancing could lead to new and interesting concepts for human-product interaction. The ideas ranged from ensuring a smoother interaction to creating a
The
Finally, as stated before, the designer needs to become quite familiar with the idea of the ‘dancing interaction’ to be able to apply it. As often stated in movement-based-design literature, it is practically needed for the designer to become a dancer itself as the author of this paper is. However, it is likely to be argued that it is not a method that would be suitable for every designer. That is why this author decided to
Conclusion
To answer the research question posed at the beginning of this paper of how concepts from social dance can be used in the design of physical human-product interaction, it can be concluded on three levels: (1) the social dance concepts of ‘flow’, ‘improvisation’ and ‘leading & following’ can be used to understand human-product interaction as a conversational dance to ensure a more fun and pleasant ‘dancing interaction’ between user and product, (2) to better design for movement-based interaction, it is helpful for designers to understand movement themselves in their own bodies, thus, to move themselves during the design process, and (3) on a higher level, it is useful for designers to broaden their design skills using different types of practices they have affinity with; why use only one toolbox when you actually have more at hand? All three combined, this paper showed using the case study of the redesign of the vacuum cleaner, that design can use the understanding of personal experiences of social dancing to create or redesign physical products from a new perspective. A perspective in which all interactions, even the design process itself, can be seen as graceful and
REFERENCES
De Jaegher, H., & Di Paolo, E. (2007). Participatory sense-making. Phenomenology and the cognitive sciences, 6(4), 485-507.
DeMers, J.D. (2013) Frame matching and ΔpTed: a framework for teaching Swing and Blues dance partner connection, Research in Dance Education, 14:1, 71-80, DOI: 10.1080/14647893.2012.688943
Findeli, A. (2010). Searching for Design Research Questions: Some Conceptual Clarifications. In Questions, Hypotheses & Conjectures: Discussions on projects by early stage and senior design researchers (pp. 286–303).
Frayling, C. (1993). Research in Art and Design. Royal College of Arts: Research Papers 1:1.
Höök, K. (2010). Transferring qualities from horseback riding to design. In Proceedings of the 6th Nordic Conference on Human-Computer Interaction: Extending Boundaries (pp. 226-235). ACM.
Isbister, K., & Höök, K. (2009). On being supple: in search of rigor without rigidity in meeting new design and evaluation challenges for HCI practitioners. In Proceedings of the SIGCHI conference on human factors in computing systems (pp. 2233-2242). ACM.
Jensen, M. V., Buur, J., & Djajadiningrat, T. (2005). Designing
Kirsh, D. (2013). Embodied cognition and the magical future of interaction design. ACM Transactions on Computer-Human Interaction (TOCHI), 20(1), 3.
Larssen, A. T., Loke, L., Robertson, T. J., & Edwards, J. (2004). Understanding Movement as Input for Interaction-a study of Two EyeToy (
Loke, L., & Robertson, T. (2008). Inventing and devising movement in the design of movement-based interactive systems. In Proceedings of the 20th Australasian Conference on Computer-Human Interaction: Designing for Habitus and Habitat (pp. 81-88). ACM.
Merleau-Ponty, M. (1962). Phenomenology of Perception. Routledge.
Schiphorst, T. (2007). Really, really small: the palpability of the invisible. In Proceedings of the 6th ACM SIGCHI conference on Creativity & cognition (pp. 7-16). ACM.
Suchman, L. A. (1987). Plans and situated actions: The problem of human-machine communication. Cambridge university press.
Sundström, P., & Höök, K. (2010). Hand in hand with the material: designing for suppleness. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems(pp. 463-472). ACM.
Van Dijk, J., van der Lugt, R., & Hummels, C. (2014). Beyond distributed representation: embodied cognition design supporting socio-sensorimotor couplings. In Proceedings of the 8th International Conference on Tangible, Embedded and Embodied Interaction (pp. 181-188). ACM.